



Triosni horizontalni vrtljivi pozicioner / pozicioner za varilni robot
Tehnični parametri
| Vertikalni triaksialni servo pozicioner | Horizontalni rotacijski triaksialni servo pozicioner | ||||||
| Serijska številka | PROJEKTI | Parameter | Parameter | OPOMBE | Parameter | Parameter | OPOMBE |
| 1 | Nazivna obremenitev | 500 kg | 1000 kg | Znotraj polmera R400 mm druge osi | 500 kg | 1000 kg | Znotraj polmera R400 mm/R500 mm druge osi |
| 2 | Standardni polmer vrtenja vretena | R1200 mm | R1500 mm | R1200 mm | R1800 mm | ||
| 3 | Standardni polmer vrtenja predležne gredi | R400mm | R500mm | R400mm | R500mm | ||
| 4 | Kot nagiba prve osi | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Kot vrtenja druge osi | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Nazivna hitrost dviga prve osi | 50°/J | 24°/J | 50°/J | 24°/J | ||
| 7 | Nazivna vrtilna hitrost druge osi | 70°/J | 70°/J | 70°/J | 70°/J | ||
| 8 | Ponavljanje natančnosti pozicioniranja | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Mejna dimenzija okvirja premika (dolžina × širina × višina) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Celotna dimenzija prestavnega mehanizma (dolžina × širina × višina) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Višina središča vrtenja prve osi | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Pogoji napajanja | Trifazni 200 V ± 10 % 50 Hz | Trifazni 200 V ± 10 % 50 Hz | Trifazni 200 V ± 10 % 50 Hz | Trifazni 200 V ± 10 % 50 Hz | Z izolacijskim transformatorjem | |
| 13 | Izolacijski razred | H | H | H | H | ||
| 14 | Neto teža opreme | Približno 1800 kg | Približno 3000 kg | Približno 2000 kg | Približno 2000 kg | ||
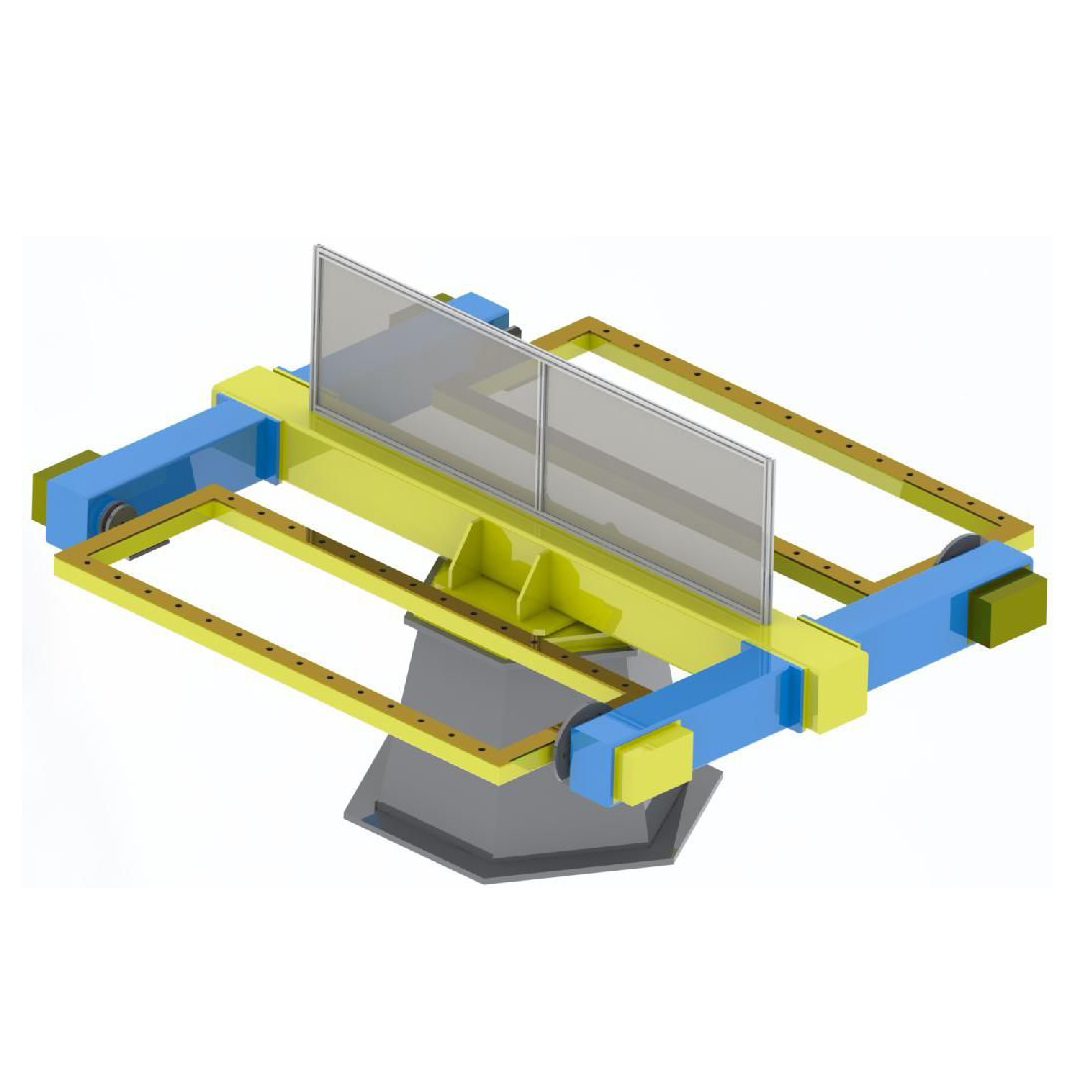
Horizontalni rotacijski triaksialni servo pozicioner

Vertikalni triaksialni servo pozicioner
Uvod v strukturo
Triaksialni vertikalni servo pozicioner je sestavljen predvsem iz varjenega integriranega okvirja, okvirja za premik, AC servo motorja in RV preciznega reduktorja, rotacijske podpore, prevodnega mehanizma, zaščitnega ščita in električnega krmilnega sistema.
Varjeni integralni okvir je varjen iz visokokakovostnih profilov. Po žarjenju in razbremenitvi napetosti se obdela s profesionalno strojno obdelavo, da se zagotovi visoka natančnost obdelave in natančnost ključnih položajev. Površina je popršena z barvo proti rjavenju, ki je lepa in bogata, barvo pa je mogoče prilagoditi zahtevam stranke.
Okvir za premik obračanja mora biti varjen iz visokokakovostnega profilnega jekla in obdelan s profesionalno strojno obdelavo. Površina mora biti strojno obdelana s standardnimi navojnimi luknjami za pritrditev pozicionirnega orodja, izvedena pa mora biti tudi barvanje, črnjenje in zaščita pred rjo.
Kot pogonski mehanizem je izbran AC servo motor z RV reduktorjem, ki lahko zagotovi stabilnost vrtenja, natančnost pozicioniranja in
Dolga vzdržljivost in nizka stopnja okvar. Prevodni mehanizem je izdelan iz medenine, ki ima dober prevodni učinek. Prevodna osnova ima integrirano izolacijo, ki lahko učinkovito zaščiti servo motor, robota in varilni vir napajanja.
Električni krmilni sistem uporablja japonski Omron PLC za krmiljenje pozicionerja, s stabilnim delovanjem in nizko stopnjo napak. Električne komponente so izbrane od znanih domačih in tujih blagovnih znamk, kar zagotavlja kakovost in stabilnost uporabe.
Zaščita pred svetlobo je sestavljena iz aluminijastega profila in aluminijaste plastične plošče za zaščito pred obločno svetlobo, ki nastane med varjenjem in rezanjem.








